In collaboration with Professor Venanzio Cichella at the University of Iowa, Moshman Research is developing a control framework for autonomously controlling swarms of satellites for future NASA missions. The proposal can be downloaded at the bottom of the page. Please fill out our contact form for more information.
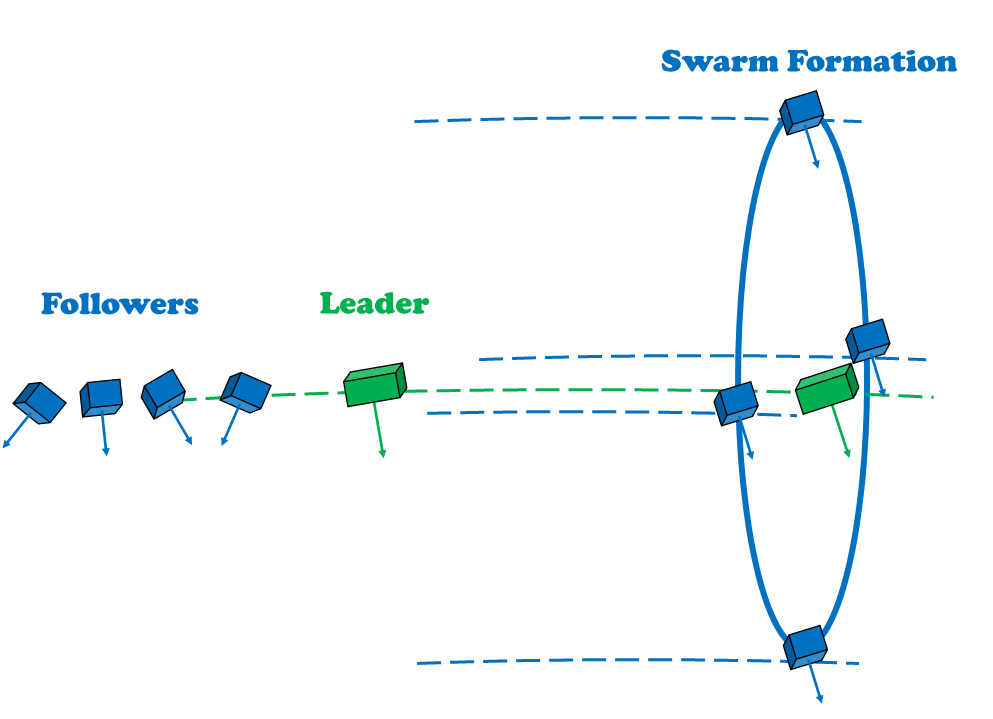
A leader (green) and follower (blue) space vehicles make up a swarm. The leader directs the followers from an arbitrary initial state into a swarm formation.
A follower (blue) relative to a leader (green) spacecraft in a geocentric equatorial frame. The state vector and orbital elements are shown.
Relative position (top) and velocity (bottom) of the leader and a follower spacecraft during a rendezvous maneuver. The discontinuities in the relative velocity at the initial and final moments illustrate the optimal, bang-bang type control.